 |
IPSDK 4.1.0.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.1.0.2
IPSDK : Image Processing Software Development Kit
|
| Features2dRegistrationResult = | greySignedFeaturesImg2dRegistration (inOriginImg2d,inTargetImg2d,inRegMotionModel2d) |
| Features2dRegistrationResult = | greySignedFeaturesImg2dRegistration (inOriginImg2d,inTargetImg2d,inScaleCandidates,inGradStdDev,inOptGradientGaussianCoverage,inCornerDetectionParams2d,inNbFeatures,inFeaturesDistX,inFeaturesDistY,inInterpolationPolicy,inSamplingBallInfo2d,inRegMotionModel2d,inCorrelationThreshold2d,inOptRegistrationEstimationConfig,outFeatures2dRegistrationResults) |
| Features2dRegistrationResult = | greySignedFeaturesImg2dRegistration (inOriginImg2d,inTargetImg2d) |
| Features2dRegistrationResult = | greySignedFeaturesImg2dRegistration (inOriginImg2d,inTargetImg2d,inGradStdDev,inNbFeatures,inFeaturesDist,outFeatures2dRegistrationResults) |
| Features2dRegistrationResult = | greySignedFeaturesImg2dRegistration (inOriginImg2d,inTargetImg2d,inScaleCandidates) |
| Features2dRegistrationResult = | greySignedFeaturesImg2dRegistration (inOriginImg2d,inTargetImg2d,inScaleCandidates,inGradStdDev,inNbFeatures,inFeaturesDist,outFeatures2dRegistrationResults) |
algorithm allowing registration of 2d images using features associated to grey signature
This algorithm allows to automatically compute motion transform linking two images. Given an origin image  and a target image
and a target image  , this algorithm basically allows to automatically compute motion transform linking. We compute transformation allowing to link points of images with following formula :
, this algorithm basically allows to automatically compute motion transform linking. We compute transformation allowing to link points of images with following formula :
![\[ P_{target}=sR(\theta)P_{origin} + T(T_x, T_y) \]](form_967.png)
with :
 a scale factor computed in similarity case (ie. ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Similarity) and equal to 1 in rigid case (ie. ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Rigid).
a scale factor computed in similarity case (ie. ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Similarity) and equal to 1 in rigid case (ie. ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Rigid). a rotation matrix, see Rotations 2d.
a rotation matrix, see Rotations 2d. a translation vector
a translation vectorThe computed transformation can also be of form :
![\[ \bar{P}_{target}=H \bar{P}_{origin} \]](form_970.png)
in case of homography motion model (ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Homography) with :
 homogeneous coordinates associated to point
homogeneous coordinates associated to point 
 a 3x3 matrix
a 3x3 matrixThis algorithm is composed of three main phasis :
Extraction phasis can be controlled via following parameters :  ,
,  ,
,  ,
,  ,
,  ,
,  ,
,  and
and  (see Extract grey signed features 2d).
(see Extract grey signed features 2d).
Motion transform computation phasis can be controlled via following parameters :  ,
,  and
and  . Note that in case where parameter is set to ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Similarity or ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Homography, algorithm will iterate on its three main phasis searching for best results adusting used scale for feature extraction (this phasis is not scale invariant see Extract grey signed features 2d). In this case an additional parameter
. Note that in case where parameter is set to ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Similarity or ipsdk::imaproc::attr::eRegistrationMotionModel2d::eRMM2d_Homography, algorithm will iterate on its three main phasis searching for best results adusting used scale for feature extraction (this phasis is not scale invariant see Extract grey signed features 2d). In this case an additional parameter  allows to defined candidates for tested scale factor.
allows to defined candidates for tested scale factor.
Here is an example of usage of this algorithm in case of similarity transform computation :
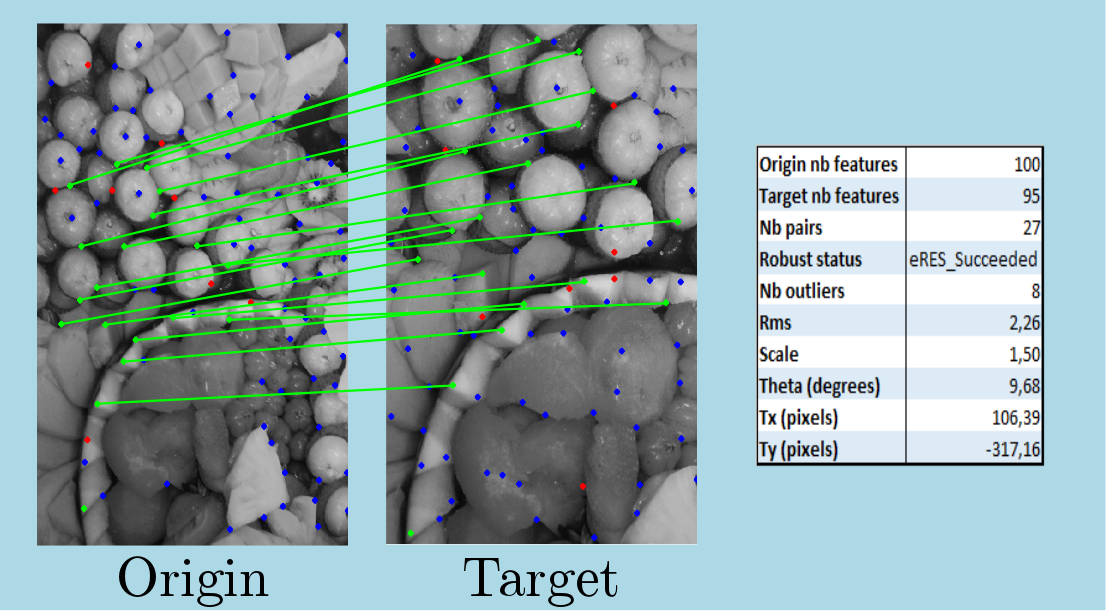
In this case, we ask for 100 detected features. Given used distance between features, algorithm provided 100 detected features in first image and only 95 in second one. Given used correlation threshold (set to 0.95 in this case), only 27 made pairs are keeped (blue points stands for rejected data during pairing phasis).
This allows a robust computation of similarity transformation which detects 8 outliers in input collections (red points) leaving 19 inliers (green points linked between images).
On output algorithm estimates a root mean square of residuals equal to 1.38 pixels which grants a good estimation of transformation.
Here is a second example of usage of this algorithm in case of similarity transform computation :
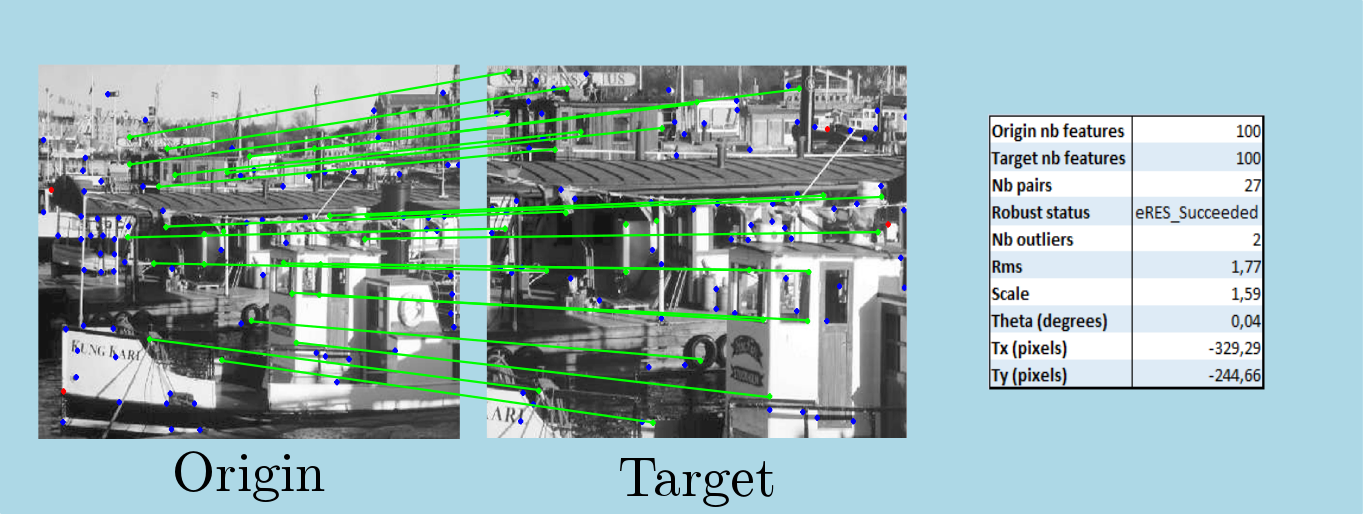
In this case, we ask for 100 detected features. Given used distance between features, algorithm provided 100 detected features in first image and second images. Given used correlation threshold (set to 0.95 in this case), only 27 made pairs are keeped (blue points stands for rejected data during pairing phasis).
This allows a robust computation of similarity transformation which detects 2 outliers in input collections (red points) leaving 25 inliers (green points linked between images).
On output algorithm estimates a root mean square of residuals equal to 1.77 pixels which grants a good estimation of transformation.
