|
IPSDK 4.1.0.2
IPSDK : Image Processing Software Development Kit
|
|
IPSDK 4.1.0.2
IPSDK : Image Processing Software Development Kit
|
| image = | colorMapping2dImg (inImg,colorMap) |
| image = | colorMapping2dImg (inImg,colorMap) |
| image = | colorMapping2dImg (inImg,pIColorMap) |
| image = | colorMapping2dImg (inImg,pIColorMap) |
application of a color map on each 2D plan of an input grey-levels image
This algorithm applies a given color map to each 2D plan of an input grey-levels image with voxels values encoded with unsigned integers, in order to make the visualization of the input image easier for the user.
There are mainly two types of color maps that can be used by the algorithm: the cyclic color maps and the smooth color maps.
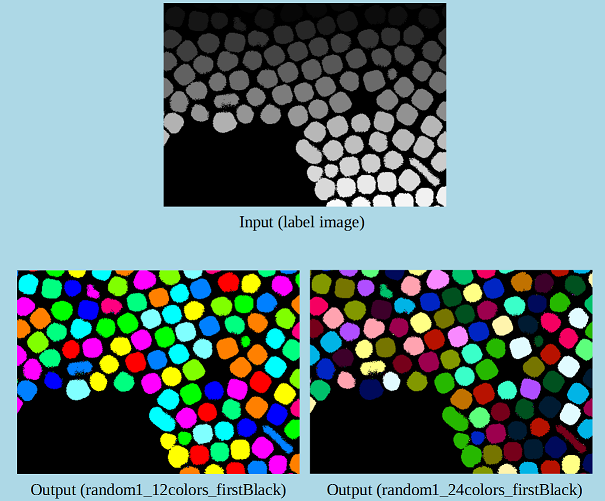
In cyclic color maps, the table defined in the color map is a collection of Rgb data items, that are triplets of (R, G, B) normalized floating values, between 0 and 1, that define the color to apply. If the number of colors defined in the map is lower than the number of intensities in the input image, the colors to apply to intensities greater than the map size are automatically deduced as the repetition of the table elements. These color maps are typically used to visualize label images, for instance. Depending on the cycle mode chosen by the user, the first color of the map may or may not belong to the cycle. It may be useful in label images where the 0-value is reserved for the background, for instance (in that case, it may be desirable that a specific color may be dedicated for that background).
To sum it up, given an input image (2D here, for the example) and a specific cyclic color map, values of the color output image will equal to:
![\[ OutImg(x, y) = \begin{cases} colorMap.lookupTable[InImg(x, y) mod len(lookupTable.table)], \text{if } colorMap.cycleMode == eRgbColorMapCycleMode.eRCMCM_AllCyclic \\ colorMap.lookupTable[InImg(x, y) mod len(lookupTable.table)], \text{if } colorMap.cycleMode == eRgbColorMapCycleMode.eRCMCM_ExcludeFirstFromCycle \end{cases} \]](form_849.png)
The user can specify its own customized color map, but IPSDK also provides some predefined color maps, for both types of maps:











Here are different examples of predefined cyclic color maps applied to a label image:
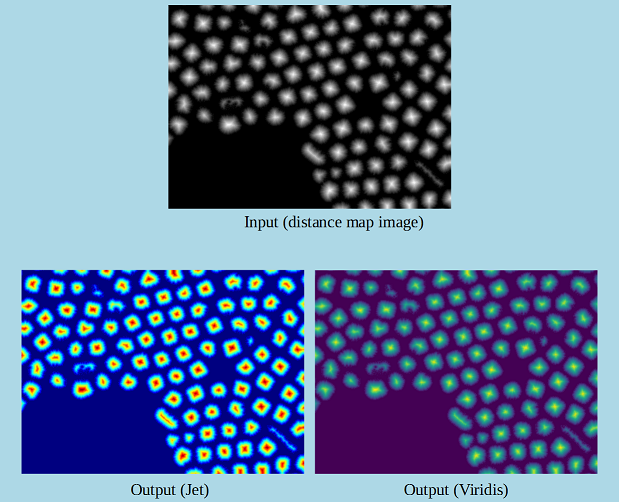
And here are different examples of predefined smooth color maps applied to Lena grey levels image: